castman.fr – La technologie, à la portée de tous ! Toujours d’actualité … Écologie et technologie en harmonie, est-ce encore de l’utopie ? Sur mon site, vous trouverez une mine d’informations, sur les produits high-tech en général. Vous trouverez aussi, des tutoriels, des astuces, mes coups de gueule et mes coups de cœur, sans oublier, mon espoir sur le thème “Je contribue, pour ma planète !“. Je n’ai pas la science infuse, mais c’est la science qui fuse.
Pour ceux qui possèdent une tablette 97RQ, je vous présente ci-dessous la procédure pour installer une version Android 4.4.4 “KitKat”.
Cette procédure fonctionne, sur la tablette 97RQ et sur la tablette N90FHDRK.
Trois défauts majeurs, pour ma tablette qui présente certainement un problème physique de NAND ou d’espace de stockage !
Plan du tutoriel
1 – Défaut d’Android 4.4.4 sur 97RQ.
2 – Un conseil logique.
3 – Procédure d’installation en images.
3-1 Installation de la nouvelle image système du PC vers votre tablette.
3-2 Finalisation de l’installation sur la tablette.
4 – Premier démarrage et test.
.
— Début —
.
1 – Défaut d’Android 4.4.4 sur 97RQ.
– La batterie ne tient pas la charge longtemps. (Entre 2 heures 30 et 4 heures)
– Sur ma tablette, en 1 mois j’ai planté deux fois, donc réinstallation obligatoire.
– Manque de réactivité lors des manipulations et du lancement d’une application.
2 – Un conseil logique.
Avant toute chose !
Si votre tablette fonctionne parfaitement et que vous n’avez jamais rencontré de problèmes majeurs avec celle-ci, ne suivez surtout pas cette procédure !
NE LE FAITES PAS !
Je ne suis en aucun cas responsable des dommages occasionnés suite à une mauvaise manipulation.
.
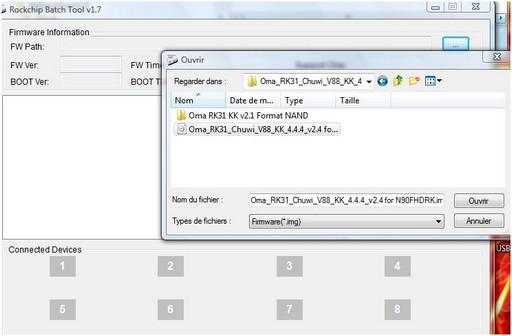
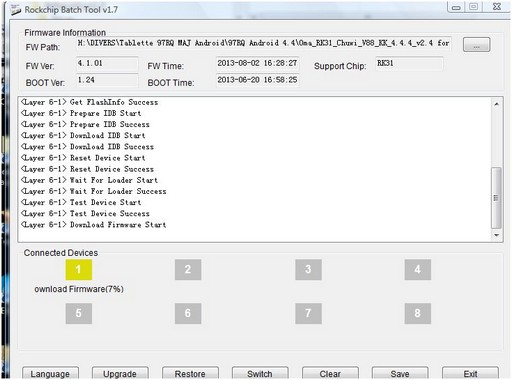
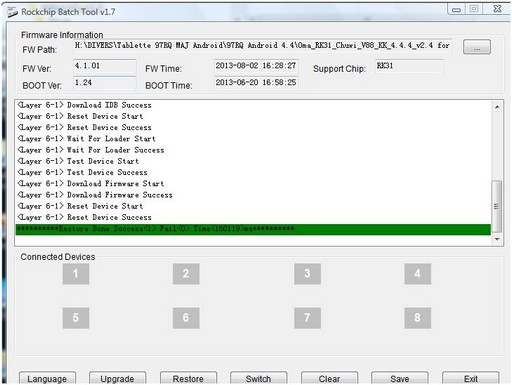
3- Procédure d’installation en images.
3-1 Installation de la nouvelle image système du PC vers votre tablette.
Votre tablette doit être chargée à 100%, avant de poursuivre.
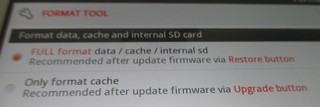
Décompresser l’image. Résultat trois fichiers”Oma_RK31_Chuwi_V88_KK_4.4.4_v2.4 for N90FHDRK.img“, un fichier texte le fichier “Oma RK31 KK v2.1 Format NAND.zip“.
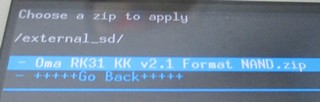
Copier le second fichier nommé “Oma RK31 KK v2.1 Format NAND.zip“, vers une micro SD vierge en fat32.
Dans cette troisième partie, je m’attelle à installer Lubuntu sur une micro SD et sur un disque dur “SATA“, pour que le démarrage du Cubietruck se fasse sur ceux-ci.
Je vais aussi tester les GPIO, sans oublier l’installation d’un Arduino sur un port USB, pour en tester le bon fonctionnement.
PLAN DU TUTORIEL
.
1 – Installation de Lubuntu sur une micro SD.
2 – Installer Lubuntu sur un HDD en SATA.
3 – Activation des GPIO et test de fonctionnement.
4 – Tester un Arduino sur un Cubietruck.
5 – Installation de Fedora 19 R3, sur carte micro SD.
6 – Installation et utilisation de SSH via un PC sous Windows avec PuTTY.
7 – Correction des mises à jour sous Lubuntu : “sudo apt-get update” et sudo apt-get upgrade”.
8 – Plantage de ma session Linaro avec mot de passe linaro.
—-Début—-
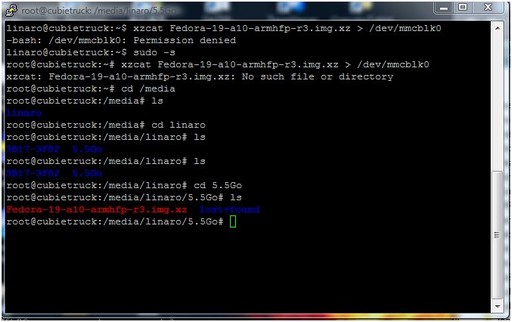
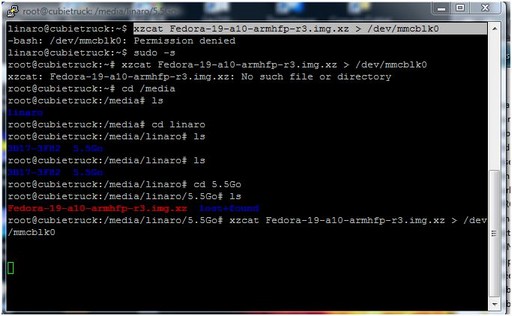
Important ! J’utilise le bleu, pour simplifier la lecture des lignes de commandes que vous devez taper dans votre terminal.
ATTENTION !Lors de cette phase, j’ai fait des erreurs, et pourtant je connais l’outil “fdisk”. J’ai corrompu ma micro SD. Pour corriger cela, j’ai utilisé un outil sous Windows pour corriger le MBR de cette carte micro SD, car elle ne fonctionnait plus et n’avait plus de cylindre …..
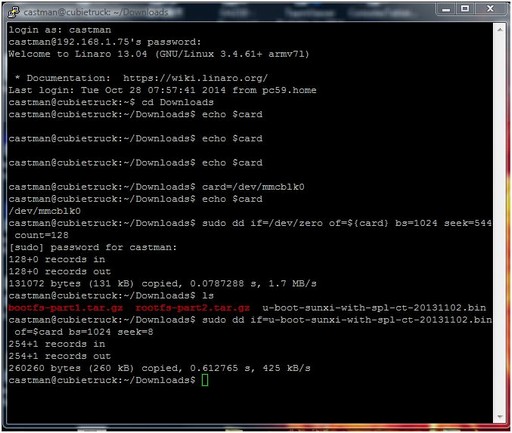
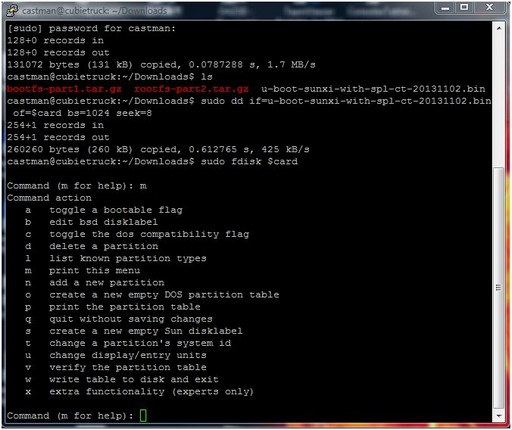
Création des partitions.
Taper :
sudo fdisk $card
Vous êtes maintenant dans le programme de création de partition. Taper “m” pour les commandes.
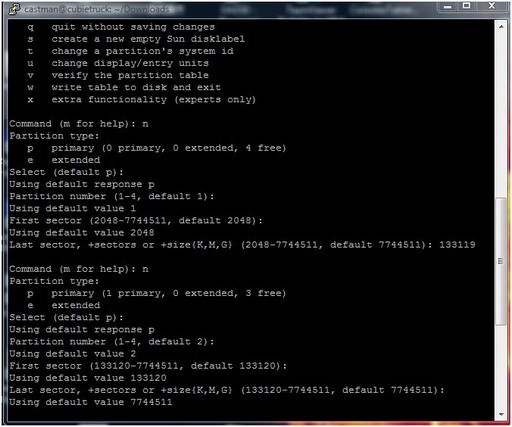
Créer les partitions.
Première partition, taper :
n
p
1
2048
133119
Seconde partition, taper :
n
p
2
133120
7744511 (Dans mon cas c’est cette valeur, pour vous c’est la taille maximale par défaut)
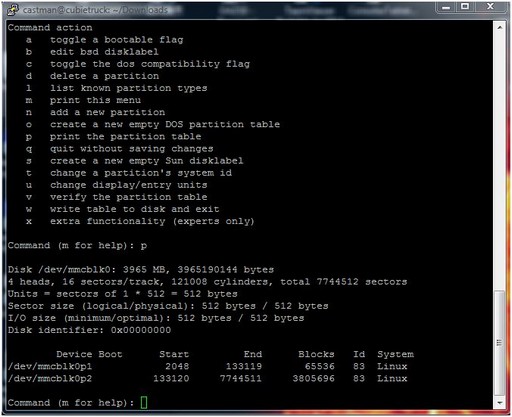
Vérifier les partitions, en tapant :
p
Valider les partitions en tapant :
w
C’est fini pour les partitions. (Vous n’êtes plus sous fdisk)
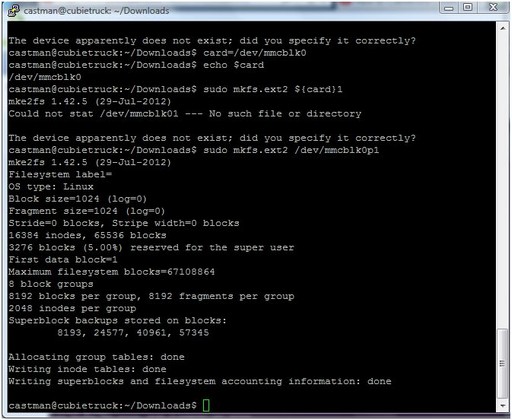
Maintenant, taper :
echo $card
Ce qui donne dans mon cas :
Device Boot Start End Blocks Id System
/dev/mmcblk0p1 2048 133119 65536 83 Linux /dev/mmcblk0p2 133120 7744511 3805696 83 Linux
J’identifie sur mon Cubietruck les partitions /dev/mmcblk0p1 et /dev/mmcblk0p2 pour les insérer dans les deux lignes ci-dessous :
sudo mkfs.ext2 /dev/mmcblk0p1
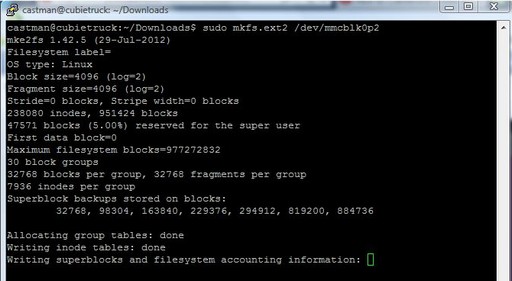
sudo mkfs.ext4 /dev/mmcblk0p2 .
.Copie des fichiers...
mkdir /tmp/sdd1 /tmp/sdd2
sudo mount -t ext2 /dev/mmcblk0p1 /tmp/sdd1
sudo mount -t ext4 ${card}2 /tmp/sdd2
sudo tar -C /tmp/sdd1 -xvf bootfs-part1.tar.gz
sudo tar -C /tmp/sdd2 -xvf rootfs-part2.tar.gz
Soyez patient, c’est très long !
sync
sudo umount /tmp/sdd1
sudo umount /tmp/sdd2
C’est fini !
Redémarrer le Cubietruck avec votre micro SD, vous démarrerez sur celle-ci sans toucher à votre Lubuntu en NAND.
.
2 – Installer Lubuntu sur un HDD en SATA.
J’utilise ici, la méthode la plus simple pour copier votre version de Lubuntu sur votre HDD en SATA ou USB, tout en rendant celui-ci démarrable sur le port SATA.
Préparer la partition pour accueillir le Rootfs.
Sous Windows, utiliser un logiciel de partitionnement comme “MiniTool Partition Wizard Home Edition” gratuit.
Cliquer sur “miniTool Partition Wizard“.
Sélectionner le disque vierge sans partition que vous venez de connecter.
Dans mon cas, c’est un HDD SATA de 250 Go, vierge.
Je crée une partition de 20 Go, en primaire, en Ext4.
Le logiciel le prépare comme un disque Linux 83.
Je lance la procédure, c’est fait.
Je branche mon disque USB sur les deux ports USB de libre sur le Cubietruck.
J’active mon disque dans Lubuntu.
Je vous conseille d’effectuer cette procédure sur le port SATA, pour éviter certaines erreurs lors du démarrage.
Dans un terminal :
Taper :
sudo -s
fdisk -l
fdisk /dev/sda
Je quitte car ma partition existe bien et elle est correcte, en tapant :
Q
Taper :
sudo su – root
Copie du Rootfs sur le HDD SATA
dd if=/dev/nandb of=/dev/sda1 bs=1M
J’ai deux lignes qui s’affichent à la fin de la procédure : 2048+0 records in 2048+0 records out
Changer les paramètres du Boot pour démarrage sur le disque dur SATA : mount /dev/nanda /mnt
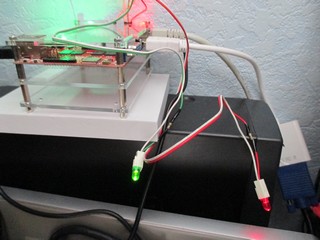
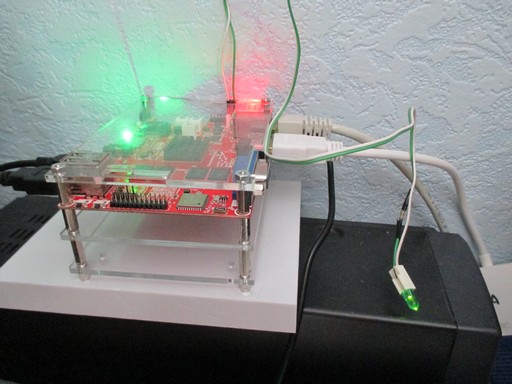
Merci à Eduardo Ibarra, pour son travail qui m’a permis de trouver une solution pour les GPIO avec une méthode assez simple.
J’utilise deux LED, l’une est rouge l’autre verte. Sur le pôle + de la LED, j’intègre une résistance de 100 ohms (marron/noir/marron//or), cela suffit amplement.
3-1 Installation des programmes et compilation.
Nous devons en premier installer les programmes utiles pour la compilation. Dans un terminal en “SU“.
Nous devons commencer par l’installation de “git“, en tapant : sudo apt-get install git
Il nous faut installer aussi “make”, en tapant : sudo apt-get install make
Quand c’est fait, taper : git clone git://github.com/linux-sunxi/sunxi-tools.git
Maintenant nous allons dans le répertoire de “sunxi-tools” cd sunxi-tools
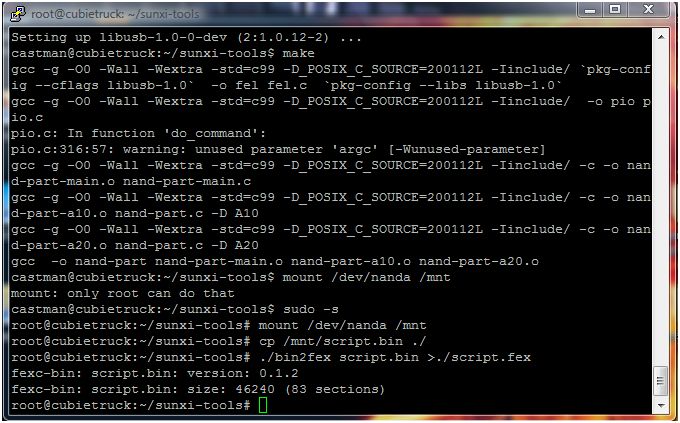
Lancer la compilation, en tapant : make
J’ai encore des erreurs !
J’installe dans le répertoire actuel, et je tape : sudo apt-get install pkg-config
Sans oublier : sudo apt-get install libusb-1.0
Je relance la compil : make
Enfin, j’y suis arrivé !
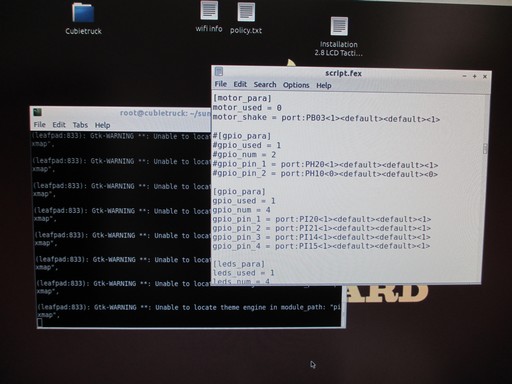
3-2 Modification du scipt.
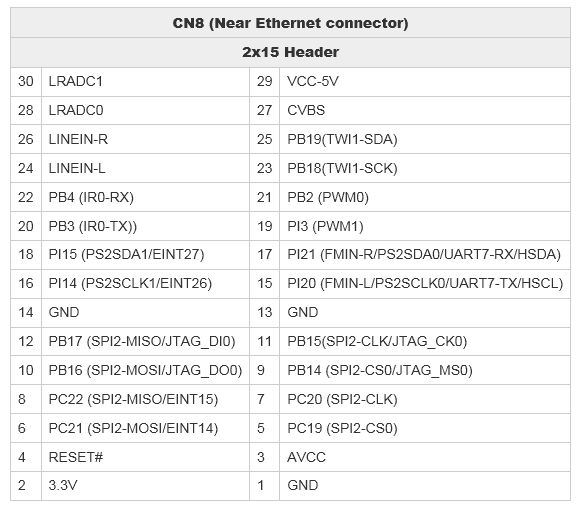
Avant de continuer !
Vous devez tenir compte des informations ci-dessous des GPIO sur le connecteur CN8.
Taper : sudo -s
Maintenant, nous sommes en ROOT.
Taper : mount /dev/nanda /mnt
cp /mnt/script.bin ./
./bin2fex script.bin >./script.fex Nous allons ouvrir le fichier script.fex.
ATTENTION !
Je repasse sur mon Cubietruck dans un terminal en ROOT, car j’étais en Putty sur mon PC. Je tape : sudo -s Je suis en “root@cubietruck:~#”
Taper : cd sunxi-tools
Ensuite :
leafpad script.fex dans la section “[gpio_para]“, j’ai :
J’ajoute un # devant chaque ligne de cette section, comme ceci : #[gpio_para] #gpio_used =1 #gpio_num = 2 #gpio_pin_1 = port: PH20<1><default><default><1> #gpio_pin_2 = port: PH10<0><default><default><0> J’ajoute les lignes suivantes juste en dessous :
Mon “echo 2 > /sys/class/gpio/export” semble déjà utilisé et ne fonctionne pas !
3-5 Test de LED.
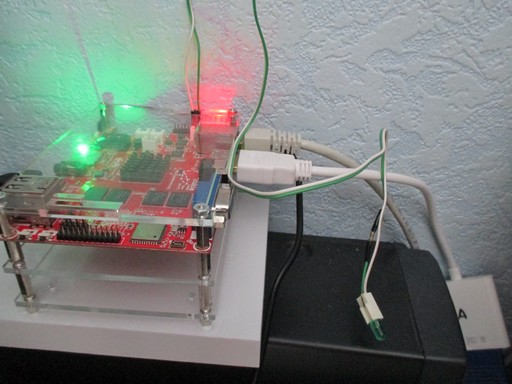
Je branche ma LED verte le +PIN 15 et la masse (-)PIN 13 de mon Cubietruck.
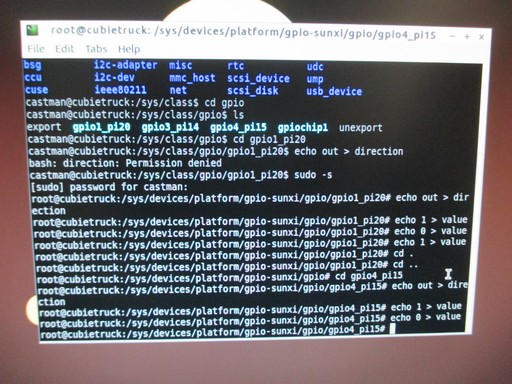
Je reste dans le même répertoire.
Taper : cd gpio1_pi20
sudo -s
echo out > direction
echo 1 > value
La LED s’allume.
pour l’éteindre, taper : echo 0 > value
Je rallume la LED en tapant :
echo 1 > value
Ensuite, je branche une autre LED rouge, avec le + sur PIN 18 et la masse (-) sur PIN 1.
Pour le test, taper : cd ..
Cela permet de revenir dans le répertoire “gpio“. Taper : cd gpio4_pi15
echo out > direction
echo 1 > value
La LED s’allume.
Pour l’éteindre, taper : echo 0 > value
.
C’est fini et ça fonctionne !
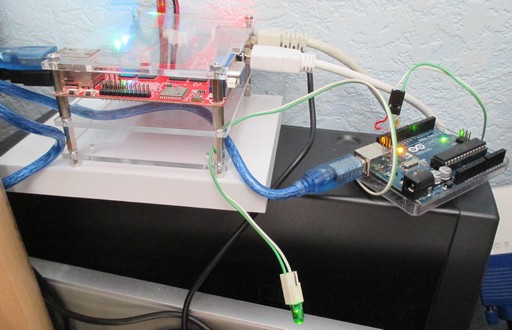
4 – Tester un Arduino sur un Cubietruck.
Pour installer le logiciel Arduino sur le Cubietruck dans l’environnement Lubuntu.
Démarrer votre Cubietruck sous Lubuntu.
Si vous avez copié des fichiers pour créer un disque boot sur micro SD je vous conseille de faire le ménage dans Downloads et de vider la corbeille.
4-1 Installation du logiciel Arduino sur le Cubietruck.
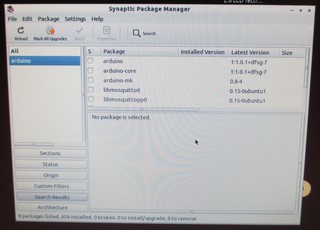
Dans le menu, “System Tools” et sur “Synaptic Package Manager”.
Cliquer sur “Search” et taper “Arduino“.
Dans la liste vous devez sélectionner “Arduino“, sans oublier de valider les paquets qui sont liés.
Lancer la procédure.
C’est long !
Éteindre le Cubietruck.
4-2 Démarrage de l’Arduino et du logiciel.
Brancher votre Arduino sur un port USB de libre sur le Cubietruck.
Démarrer votre Cubietruck.
4-3 Test de fonctionnement de l’Arduino sur le Cubietruck.
Pour lancer le programme, aller dans menu, ensuite “Electronics” et “Arduino IDE“.
Un premier message s’affiche lors du premier démarrage du logiciel Arduino IDE, cliquer sur “Add“.
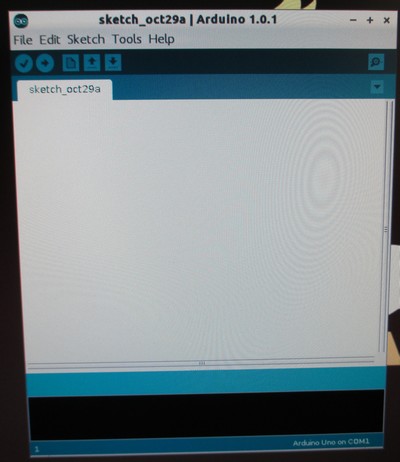
Maintenant, dans le logiciel Arduino 1.0.1 pas récent, mais tout à fait fonctionnel !
Vous constatez en bas à droite que le module Arduino est bien détecté par le Cubietruck et le logiciel, comme ceci “Arduino Uno on COM1“.
Ne pas s’en inquiéter pour l’instant.
A partir d’ici, vous pouvez faire vos expériences.
Vous pouvez changer la langue dans “File“, “Preferences“, dans “Editor language” chercher et sélectionner “Français (French)“.
Redémarrer le logiciel, c’est en Français.
4-4 Test simple.
Un petit test, permet de vérifier le fonctionnement de l’Arduino.
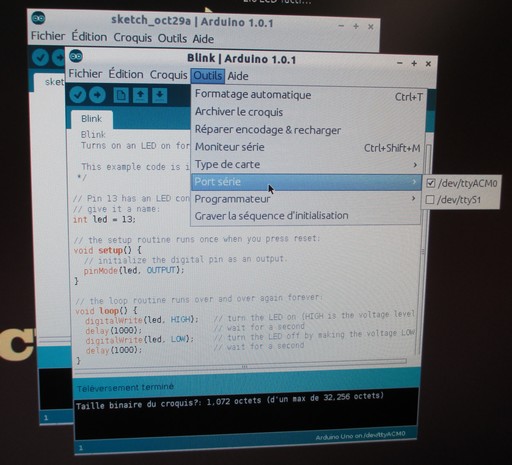
Sur le logiciel Arduino IDE, je clique dans le menu “File“, “Examples“, “Basics” et enfin “Blink“.
Sur l’Arduino, je branche une LED + sur la sortie 13avec une résistance, et la masse (-) sur un GND, juste au-dessus.
Je clique sur la flèche pour compiler et envoyer le programme vers l’Arduino.
Dès lors, un message apparaît, vous indiquant un problème de connexion vers l’Arduino.
Ce n’est pas grave !
Il suffit d’indiquer ici le bon port.
Au départ j’avais une erreur sur le port /dev/ttyACM0, j’ai donc choisi le second/dev/ttyS1. Mais cela n’était dû qu’à un problème de synchronisation avec l’Arduino.
Donc après un premier essai, je démarre sur le port /dev/ttyACM0, c’est le bon.
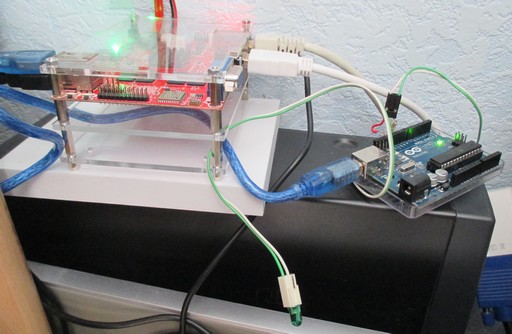
Vous constatez que la LED orange clignote en même temps que celle branché sur la sortie 13, c’est normal ! La LED orange indique qu’un programme est en cours de fonctionnement sur l’Arduino.
Résultat :
La LED verte clignote !
.
C’est cool, ça fonctionne !
Vous pouvez visualiser mon test avec cette vidéo, ci-dessous :
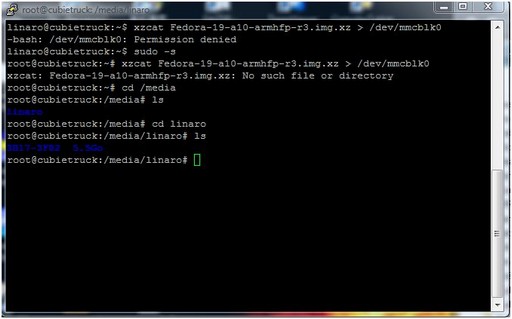
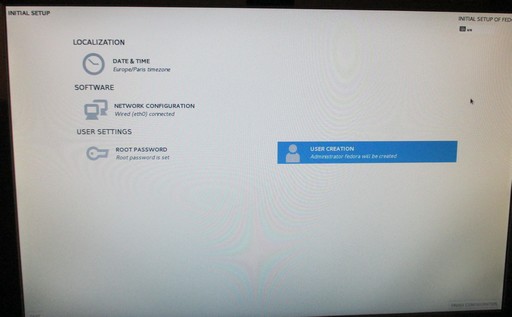
5 – Installation de Fedora 19 R3, sur carte micro SD.
5-1 Matériel.
Il vous faut une micro SD de 8 Go.
Dans mon cas, j’utilise une carte de 16 Go, car j’ai l’apparition d’un message m’indiquant “espace insuffisant” pour mes 8 Go.
Formater cette carte avec “SDFORMATTER“, c’est un programme fort utile et que j’utilise régulièrement.
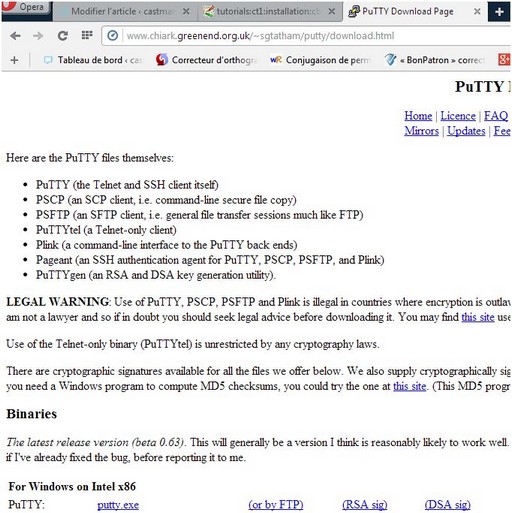
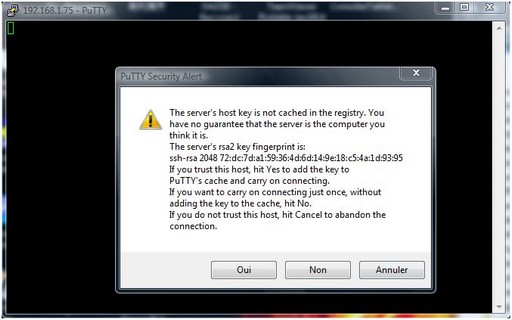
Lancer le programme en cliquant sur “putty.exe” sur votre PC.
Mettre l’adresse IP dans la case, comme sur l’image ci-dessus.
Il ne reste plus qu’à taper votre nom d’utilisateur “linaro” et votre mot de passe “linaro“.
C’est fait, vous êtes sur votreCubietruck via un serveur SSH sur Windows dans un terminal.
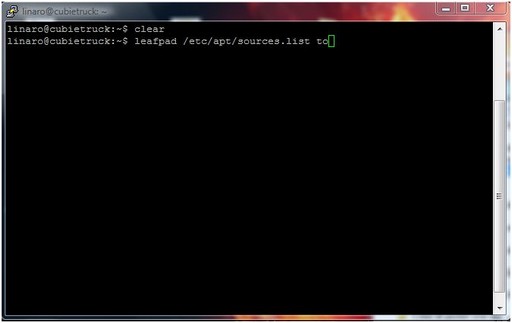
7 – Correction des mises à jour sous Lubuntu : “sudo apt-get update” et sudo apt-get upgrade”.
Suite à l’impossibilité de mettre à jour mes paquets Lubuntu sur le Cubietruck.
Dans un terminal en “SU“, taper :
sudo leafpad /etc/apt/sources.list to
Dans le fichier ouvert mettre # devant les deux premières lignes et ajouter les deux lignes ci-dessous :
deb http://old-releases.ubuntu.com/ubuntu/ quantal main universe deb-scr http://old-releases.ubuntu.com/ubuntu/ quantal main universe
Enregistrer et quitter.
Pour faire un test, taper :
sudo apt-get update
sudo apt-get upgrade
Suite à cela je peux enfin installer des programmes.
C’est une procédure de dépannage, mais ça fonctionne !
8 – Plantage de ma session Linaro avec mot de passe linaro.
Suite à diverses modifications sur ma session linaro avec le mot de passe linaro, je n’ai plus accès à ma session.
Pour l’instant, je n’ai pas de solution, car normalement ma session démarre automatiquement.
Vérification du fichier de configuration, OK.
Toujours le même problème Lubuntu démarre et arrive à la saisie de mon mot de passe. Après l’avoir tapé, ma session redémarre et retourne inlassablement à ma fenêtre de saisie de mot de passe.
Ce n’est pas grave !
J’ouvre une fenêtre TT2 sur cet écran et je dois taper un mot de passe, en cliquant sur “CTRL” “ALT” et “F2” par exemple.
J’entre dans ma session mode terminal en tapant le nom “linaro” et le mot de passe “linaro”.
Comme je suis en “SU“, je vais créer un nouvel utilisateur, en tapant :
sudo adduser castman
Je valide mon nouveau mot de passe, en tapant :
castman deux fois et plus rien, dans les messages suivants.
lorsque c’est fini, taper : sudo usermod -a -G sudo castman
Voilà, c’est fini !
Je retourne à mon mode graphique en cliquant sur “CTRL” “ALT” et “F6“, je suis de retour sur ma fenêtre de saisi de mot de passe.
Je clique dans la liste des utilisateurs, je sélectionne “castman“, et le mot de passe “castman“
C’est fait, ça fonctionne.
Redémarrer le Cubietruck.
Vous pouvez récupérer les fichiers et programmes de la session “linaro” avec “File Manager …”
Ouf !
Ce n’est pas terrible comme méthode ! Mais cela me permet de continuer à travailler rapidement sans avoir perdu mon travail sur ma session “linaro”.
Raspberry Pi A+, c’est presque la même version que le B+, avec la suppression des 4 ports USB par un seul, et la suppression du connecteur RJ45.
L’implantation est quasi identique au Raspberry Pi B+. La mémoire reste à 256 Mo face à 512 pour le modèle B+.
Annoncé à 20 $, j’attends de connaitre le prix de vente final en France, pour savoir si cela représente un réel gain face au Raspberry Pi B+, disponible entre 33 et 39 € TTC.
Pour plus d’informations sur le prix, voir en bas de l’article.
Caractéristiques :
– Processeur Brodcom BCM2835
– Décodage vidéo intégré au processeur BCM2835, avec décodage de flux vidéo en full HD
– Ram de 256 Mo
– Une sortie HDMI
– Une sortie Audio améliorée
– un micro USB pour l’alimentation du Raspberry Pi A+
– GPIO De 40 broches compatible avec les modules de la version B+ (c’est plutôt bien !)
– lecteur micro SD
– Un connecteur DSI pour brancher un écran tactile Raspberry Pi ou un autre écran
Deuxième partie sur la découverte et la configuration du Cubietruck.
Dans ce tutoriel je passe à l’installation et la configuration de Lubuntu sur la NAND.
Je vous propose aussi, une procédure pour activer le Wi-Fi.
Pour l’installation d’une distribution sur une carte micro SD et un disque dur, ce sera le sujet d’un prochain tutoriel, si j’arrive à simplifier la procédure, qui pour l’instant est assez complexe.
Bonne découverte !
Je ne suis en aucun cas responsable des dommages occasionnés suite à une mauvaise manipulation.
PLAN DU TUTORIEL
1 – Procédure d’installation de Lubuntu en mémoire NAND.
2 – Premier démarrage de Lubuntu et constat.
3 – Taille de la NAND sur mon Cubietruck.
4 – Configuration du clavier en FR “AZERTY”.
5 – Monter les disques HDD et les clés USB.
6 – Mise à jour du système et de la liste des paquets.
7 – Configuration du Wi-Fi sous Lubuntu.
8 – Audio/Vidéo.
9 – Pour utiliser la sortie VGA du Cubietruck sur Lubuntu.
10 – USB et SATA sous Lubuntu.
11 – Les différentes versions de Lubuntu.
12 – Démarrage automatique de ma session sous Lubuntu.
13 – Procédure à suivre pour supprimer le blocage de session, lors de l’arrêt du Cubietruck.
14 – USB image tool, un petit outil fort utile, pour les possesseurs de micro-ordinateurs.
.
—DEBUT—
Important ! J’utilise le bleu, pour simplifier la lecture des lignes de commandes que vous devez taper dans votre terminal.
.
1 – Procédure d’installation de Lubuntu en mémoire NAND.
Après avoir testé la version ct-lubuntu-v1.02, je préfère vous dire STOP !
Avec cette version desktop en 1.02, il y a plusieurs bugs… Impossible d’installer le Wi-Fi et à l’extinction du Cubietruck erreur d’arrêt sur un des deux coeurs du processeur A20, c’est nul ! Cela veut dire que votre Cubietruck reste allumé. Sans oublier l’impossibilité de faire l’UPGRADE de cette version.
1-2 Démarrage de la procédure d’installation de Lubuntu vers la NAND du Cubietruck.
Si vous n’avez pas encore utilisé ou installé le logiciel, vous devez décompresser le fichier “, que vous avez précédemment téléchargé.
Résultat après décompression, vous avez le répertoire suivant “*:*************PhoenixSuit1.0.7PhoenixSuit“
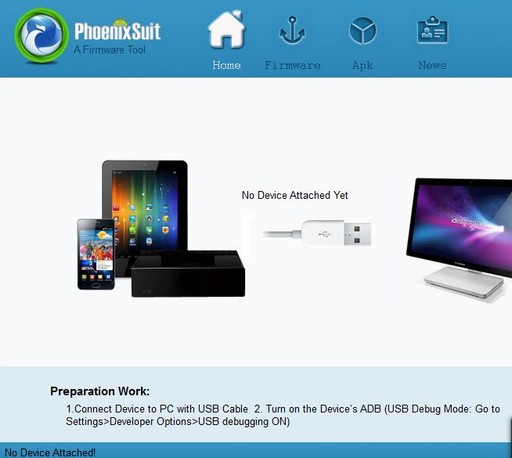
Aller dans le répertoire “PhoenixSuit” et lancer le logiciel “PhoenixSuit.exe”.
L’écran suivant s’affiche.
Vous constatez que le Cubietruck, n’est pas encore branché.
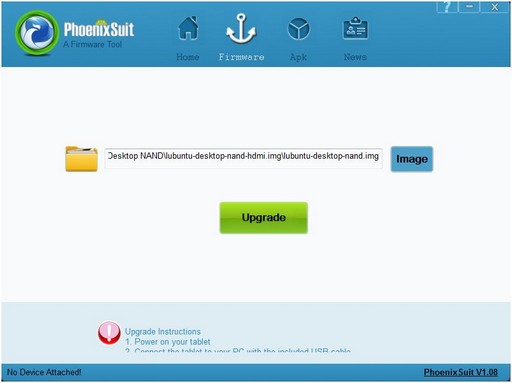
Cliquer sur l’onglet “Firmware”, et charger l’image de la distribution Lubuntu, que vous avez précédemment téléchargée et décompressée “lubuntu-desktop-nand.img.gz”. Résultat le répertoire “lubuntu-desktop-nand.img”et sélectionner “lubuntu-desktop-nand.img”.
J’utilise la méthode Cubietruck éteint, pour lancer ma procédure de mise à jour de la NAND, vers une version Lubuntu.
Vous pouvez aussi utiliser simplement le câble OTG/USB, que vous branchez sur votre Cubietruck, sur le connecteur à gauche des ports USB, mais attendez encore avant de brancher l’autre bout du câble vers le PC.
Appuyer sur le bouton “FEL”, sans le relâcher, à droite de “RESET”, et brancher le câble OTG vers la prise USB du PC.
Je fais plusieurs tentatives avant d’y arriver !
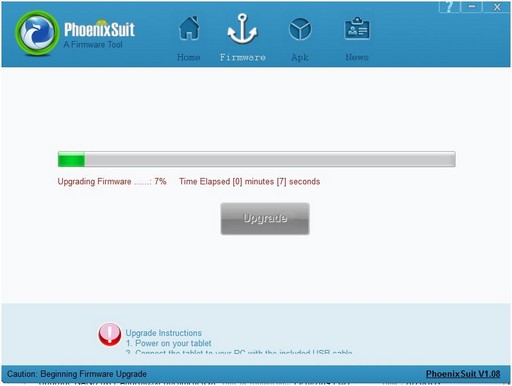
Rester sur l’onglet “Firmware”, pour suivre la procédure de mise à jour.
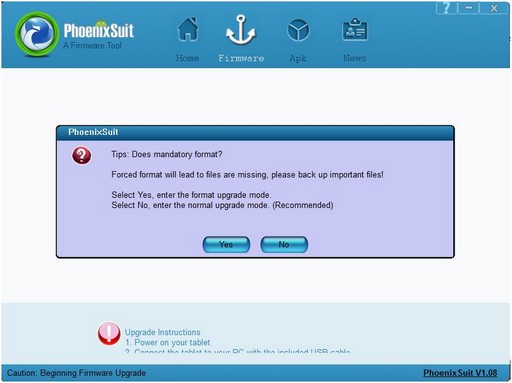
Maintenant, vous devez suivre les indications dans les messages qui se succèdent :
À vous de choisir entre “Yes or No”. Le logiciel vous recommande de cliquer sur “No”, alors suivez cette procédure.
Dans mon cas, j’utilise “Yes”.
Juste avant le démarrage de la procédure, le Cubietruck, s’éteint et rentre en mode “Reflash”.
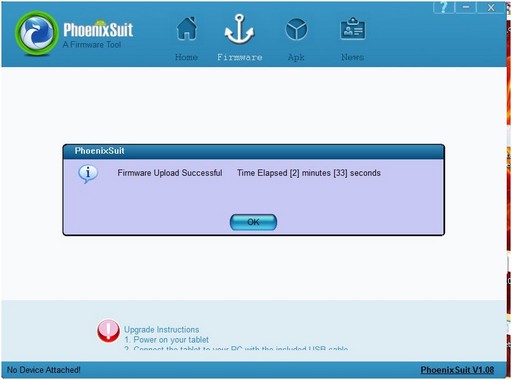
Lorsque la procédure se termine, cliquer sur “OK”.
Débrancher le câble OTG/USB du PC.
Votre Cubietruck redémarre automatiquement et lance Lubuntu.
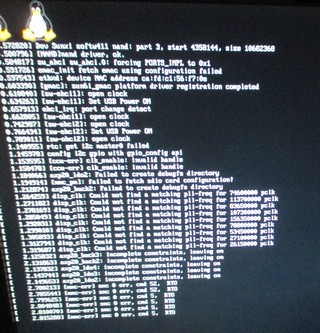
Soyez patient, car lors du premier démarrage Lubuntu se décompresse et s’installe.
.
Lors du démarrage, choisir le compte : Linaro et vous devrez taper linaro en mot de passe, ou plus précisément “linqro” sur un clavier Français “AZERTY”.
C’est fait !
.
2 – Premier démarrage de Lubuntu et constat.
Enfin, je devrais plutôt dire, second démarrage, car le premier est plus long.
Le Cubietruck démarre entre 25 et 27 secondes avec Lubuntu desktop en NAND.
Internet et disponible, si le câble RJ45 du réseau est branché.
Impossible de connecter le Wi-Fi pour l’instant !
.
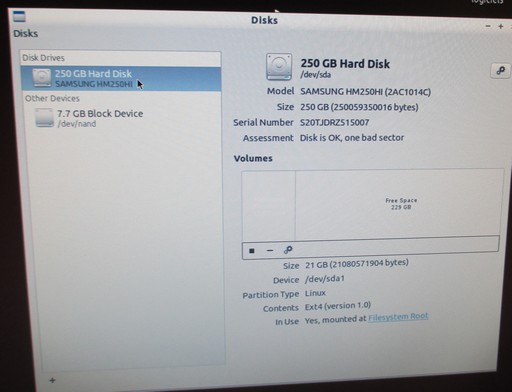
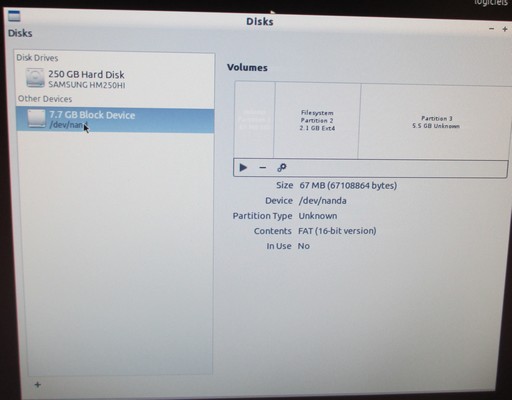
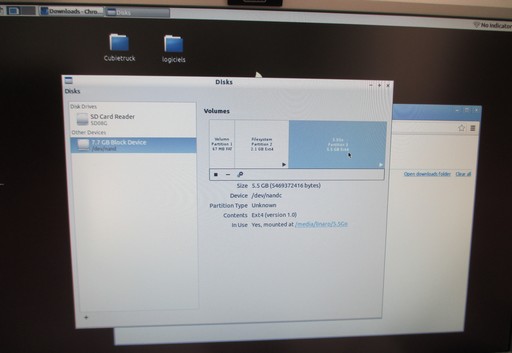
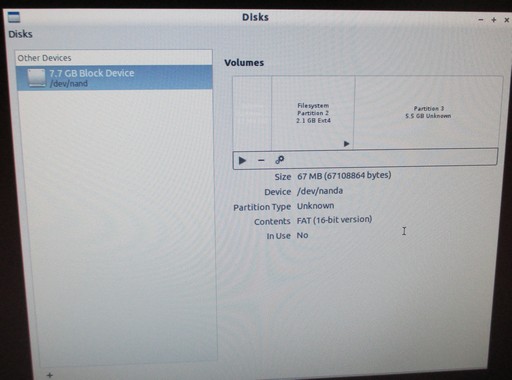
3 – Taille de la NAND sur mon Cubietruck.
J’avais constaté une taille différente sous Android de ma NAND, mais je voulais en être certain avant d’en parler.
La taille de la NAND sur mon Cubietruck est de 8 Go !
C’est COOOOOOOOLLLLL !
.
Il y a 5.5 Go non partitionné.
4 – Configuration du clavier en FR “AZERTY”.
Pour simplifier les manipulations, je vous conseille de configurer le clavier en Français.
Dans un terminal : Cliquer sur l’icône “Menu“, “Accessories“, “LXTerminal“.
Maintenant vous constatez que vous êtes en “Super User” grâce au sigle : “$“, ce qui donne : “Linaro@cubietruck ~$“
Taper ceci :
sudo dpkg-reconfigure keyboard-configuration
Valider.
Comme vous avez accès à internet, aller sur mon tutoriel et faite un copier/coller de la ligne dans LXTerminal.
C’est plus simple, n’est-ce pas !
Suivre les étapes pour configurer le nombre de touches de votre clavier, ainsi que la langue et le pays …
Redémarrer pour bien finaliser les modifications.
Voilà, vous êtes en clavier FR “AZERTY“.
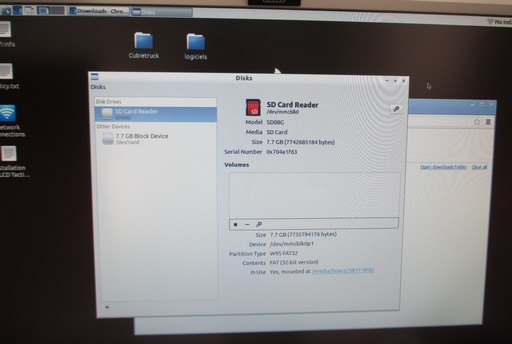
5 – Monter les disques HDD et les clés USB.
Dans cette version, cela n’est pas automatique. J’insère ma clé USB, je lance dans menu, “Accessories“, et cliquer sur “Disks“.
Dans ce logiciel vous pouvez activer ou pas un disque externe ….
Attention ! Ne pas toucher à votre disque “*.* GB Block Device sur /dev/nand“, c’est celui de votre système dans la NAND !
Choisirl’autre disque qui doit apparaitre dans la partie gauche, pour moi c’est une clé USB de “4.1GB Driver, Generic Flash Disk“.
Je le sélectionne en cliquant une fois dessus sur la gauche et ensuite sur la droite, cliquer sur la flèche sous le rectangle bleu. (Lorsque vous passez la flèche dessus, cela indique “Mount the filesystem“).
Cliquer dessus, c’est fait, ma clé USB est montée.
Maintenant quitter le logiciel “Disks” et lancer dans menu, “Accessories“, “File Manager PCManFM“. Vous constatez l’apparition d’un nouveau disque sous “Applications” à gauche.
Cliquer dessus, vous pouvez maintenant explorer vos fichiers sur un disque dur ou une clé USB.
6 – Mise à jour du système et de la liste des paquets.
6-1 Vérification de la version de mon Kernel.
Dans un terminal, taper :
uname -a
Ou
uname -v
Résultat dans mon cas : “Linux cubietruck 3.4.61+…….“
6-2 Mise à jour de la liste des paquets logiciels.
Sur le bureau, lancer un terminal. Ex (LXTerminal). Vous êtes déjà en super user “SU” sur cette version de Lubuntu.
Télécharger les paquets pour configurer le clavier en français, en tapant :
sudo dpkg-reconfigure keyboard-configuration
Si vous ne l’avez pas encore fait !
Commencer par mettre à jour, la liste des paquets pour Lubuntu :
sudo apt-get update
Résultat, avec cette version, il y a des liens indisponibles !
6-3 Mise à jour du système.
(Ceci permet entre autres de protéger votre système sur des failles de sécurité récemment détectées).
Toujours dans votre terminal “LXTerminal”, vous êtes toujours en “SU” (Super User).
Taper :
sudo apt-get upgrade
C’est long, même très long, alors soyer patient ! Mais sur cette version il y a des erreurs de connexion au serveur Ubuntu.
Après cela, il faudra certainement modifier un fichier en suivant la procédure dans la section “13 – Procédure à suivre pour supprimer le blocage de session, lors de l’arrêt du Cubietruck“.
De plus, les liens vers l’update et l’upgrade, posent problème, lorsque vous tapez “sudo apt-get update” et “sudo apt-get upgrade“.
Je vous ai concocté une solution provisoire, mais fonctionnelle, dans mon troisième tutoriel sur le Cubietruck.
Prochainement !
7- Configuration du Wi-Fi sous Lubuntu.
Avant de commencer, je tiens à vous indiquer que j’ai recherché sur plusieurs sites des informations pour configurer le Wi-Fi sur le Cubietruck, mais aucun site ne m’a indiqué la méthode qui fonctionne.
7-1 Activation du Wi-fi.
Cette procédure est à faire manuellement dans un terminal !
Pour installer et activer le Wi-Fi sur le Cubietruck.
Dans mon cas le module n’est pas chargé.
dans un terminal, vérifier la présence ou non de la carte Wlan0, en tapant :
sudo -s
Taper :
ifconfig
Si le Wlan0 n’est pas présent, il n’est pas activé.
Il faut être en “root@cubietruck:/#“
taper :
modprobe bcmdhd
Pour scanner le Wi-Fi, taper :
ifconfig wlan0 up
Pour valider le Wi-fi au démarrage du Cubietruck, il faut ouvrir un fichier dans un terminal, toujours en root@cubietruck:/# taper :
cd /etc
Ensuite taper :
sudo leafpad modules
Ajouter le nom du module dans le fichier, en tapant :
bcmdhd
Enregister le fichier.
Redémarrer le cubietruck.
Pour rechercher les réseaux Wi-Fi autour de chez vous et trouver le vôtre !
iwlist wlan0 scan
Configuration de votre Wlan0 avec votre réseau Wi-Fi
Je récupère et je copie les informations trouvées pour mon réseau dans un fichier texte sur le bureau.
Je tape la ligne ci-dessous avec le nom de ma Box :
iwconfig wlan0 essid “Livebox-A7GH”
Je ne touche pas au fichier” interfaces” car cela ne fonctionne pas en ajoutant les lignes ci-dessous.
Taper :
cd /etc
cd network
Ouvrir le fichier :
sudo leafpad interfaces
on ajoute les lignes suivantes en dessous des autres, avec votre SSID et votre mot de passe Wi-Fi
auto lo iface lo inet loopback iface eth0 inet dhcp # on ajoute notre Wi-Fi allow-hotplug wlan0 iface wlan0 inet dhcp wpa-ssid Livebox-A7GH wpa-psk 2145dflfktmef58…
Enregistrer et quitter.
Je lance “Network Connections“.
Je clique sur l’onglet Wireless SSID.
Je tape le nom de ma Box “Livebox-A7GH“, je choisis le mode “infrastructure“, j’indique l’adresse mac qui est déjà dans la liste déroulante pour moi c’est par exemple : 00:90:4C:11:22:33 (wlan0).
Le “mtu automatic“. Dans l’onglet ipv4 “automatic (dhcp)“.
Dans “wireless security” , dans mon cas en “WPA &WPA2 Personnal” et enfin je tape le mot de passe dans “password”.
C’est fini.
Je redémarre le Cubietruck, ça fonctionne !
7.2 Configurer “Network Connections”.
Dans cette version de Lubuntu sur le Cubietruck, vous n’avez pas d’icône réseau à droite de l’heure pour l’instant, mais ce n’est pas grave, nous allons passer par le menu.
Cliquer sur “menu“, “Preferences” et “Network Connections“.
Dans la fenêtre qui s’affiche à l’écran, cliquer sur l’onglet “Wireless“
Maintenant, à droite cliquer sur “+ADD” et donner un nom à votre connexion, par exemple”Livebox-45A0“, en dessous dans SSID taper ” Livebox-45A0” et choisir “Infrastructure” dans mode.
Le plus important, c’est d’identifier notre carte Wi-Fi intégrée en indiquant son “Device MAC address :” cliquer dessus et comme en partie “7.1“, nous avons activé le Wi-Fi, son adresse apparaît ici, en cliquant sur la flèche, pour moi en exemple, c’est “00:15:5C:25:65 (wlan0)“, MTU en automatic.
On passe à l’onglet “IPv4Settings” et on choisi dans “Method” “Automatic (DHCP)”. Maintenant on se dirige vers le dernier onglet “Wireless Secutity” et l’on choisi son mode de sécurité dans “Secutity“, pour moi c’est “WPA & WPA2 Personnel“.
Taper le mot de passe de votre réseau Wi-Fi dans la case “Password” : “**************************”.
Cliquer sur “Save” en bas à droite de la fenêtre, voilà c’est fait !
Si tout est bon, l’icône réseau/Wi-Fi apparaît en mode recherche et se connecte à votre réseau Wi-Fi.
Vous pouvez aussi activer dans le logiciel “Network Connections”, le Wired en l’ajoutant avec “+ADD“en créant par exemple “RJ45” et choisir dans le premier onglet “Device MAC address”, l’adresse “********** (eth0)” en MTU automatic, cliquer sur Save, c’est fini.
Maintenant en redémarrant votre Cubietruck, vous ne mettrez plus 2 à trois minutes de démarrage, mais seulement 25 secondes.
Astuce ! Cliquer à côté du “N” de “No indicators” avec le bouton droit ou gauche de la souris, si l’indicateur réseau n’apparaît plus ou suite à une modification ou désactivation du Wi-Fi au démarrage.
8 – Audio/Vidéo.
8-1 HDMI <-> VGA
Pas de son via le jack 3.5 avec un casque.
Le son passe certainement par le port HDMI.
Avec les fichiers Vidéo, je n’ai aucune image avec le lecteur par défaut.
8-2 HDMI <-> HDMI TV
Les fichiers Midi et Wav fonctionnent parfaitement.
Les fichiers MP3 affichent la pochette de l’album et fonctionnent.
Pour les vidéos, le son fonctionne, mais pas d’image vidéo en MP4.
9 – Pour utiliser la sortie VGA du Cubietruck sur Lubuntu.
Vous devez choisir une distribution Lubuntu qui fonctionne avec la sortie VGA.
10 – USB et SATA sous Lubuntu.
10-1 HDD SATA sur le port SATA.
Pour commencer, il faut activer le disque dur, en suivant la même procédure que pour une clé USB, dans la section : “5 – Monter les disques HDD et les clés USB“.
Ensuite, aucun problème le disque est bien présent dans “File manager ….”.
10-2 HDD USB sur le port USB.
Les vieux disques ne démarrent pas.
Un disque dur USB récent, fonctionnent sans aucun problème, pour l’activer vous devez suivre la procédure “5 – Monter les disques HDD et les clés USB“.
11 – Les différentes versions de Lubuntu.
J’ai testé les versions Lubuntu serveur, mais pour un novice s’abstenir car tout est en ligne de commande.
Vous pouvez installer un environnement graphique dans un TT, mais ce n’est pas ma solution pour une installation et une utilisation le plus simple possible !
Je vous conseille de choisir une version Desktop de Lubuntu, pour avoir un environnement graphique au démarrage et prêt à être utilisé !
12 – Démarrage automatique de ma session sous Lubuntu.
On commence par démarrer sa session, ensuite vous ouvrez un terminal qui est en « su« .
Taper :
sudo -s
Valider.
Maintenant vous taper ceci :
sudo leafpad /etc/lightdm/lightdm.conf
Dans mon cas c’est le mot de passe ” linaro” et ma session c’est “Lubuntu“
Dans le fichier ouvert « lightdm.conf » sous leafpad, vous avez 3 lignes ci-dessous :
13 – Procédure à suivre pour supprimer le blocage de session, lors de l’arrêt du Cubietruck.
Pour Cubietruck.
Dans un terminal qui est en « su », taper :
sudo -s
Vous passez de « $ » à « # ».
Maintenant, taper :
cd /usr/share/polkit-1/actions
Ensuite, taper :
leafpad org.freedesktop.consolekit.policy
Le fichier s’ouvre dans un terminal et vous devrez modifier les mots en bleu dans le fichier ci-dessous en remplaçant »auth_admin_peek » par « yes » et cela deux fois. Enregistrer le fichier.
<action id=”org.freedesktop.consolekit.system.stop”> <description>Stop the system</description> <message>System policy prevents stopping the system</message> <defaults> <allow_inactive>no</allow_inactive> <allow_active>yes</allow_active> </defaults> </action>
<action id=”org.freedesktop.consolekit.system.stop-multiple-users”> <description>Stop the system when multiple users are logged in</description> <message>System policy prevents stopping the system when other users are logged in</message> <defaults> <allow_inactive>no</allow_inactive> <allow_active>yes</allow_active> </defaults> </action>
<action id=”org.freedesktop.consolekit.system.restart”> <description>Restart the system</description> <message>System policy prevents restarting the system</message> <defaults> <allow_inactive>no</allow_inactive> <allow_active>yes</allow_active> </defaults> </action>
<action id=”org.freedesktop.consolekit.system.restart-multiple-users”> <description>Restart the system when multiple users are logged in</description> <message>System policy prevents restarting the system when other users are logged in</message> <defaults> <allow_inactive>no</allow_inactive> <allow_active>yes</allow_active> </defaults> </action>
</policyconfig>
## Fin du fichier———————-org.freedesktop.consolekit.policy————————
Vous ne devez pas faire un copier/coller, mais modifier simplement le fichier sur votre Cubietruck.
J’espère quel cela vous sera utile !
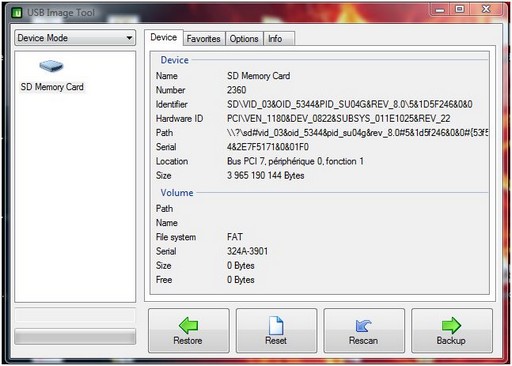
14 – USB image tool, un petit outil fort utile, pour les possesseurs de micro-ordinateurs.
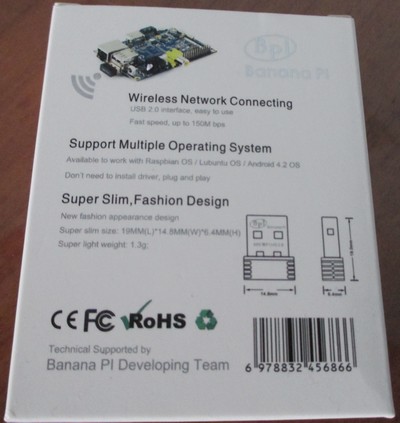
Je vous présente un petit outil, obligatoire pour les possesseurs de Banana Pi, Cubietruck, pcDuino….
Cet outil permet de créer une image de votre système Lubuntu, Android … présent sur une SD ou micro SD ou même sur une clé USB.
Vous pouvez ainsi faire une copie de vos systèmes vers votre pc et garder cette image en sauvegarde.
Ensuite vous pouvez restaurer cette image vers une SD ou micro SD et USB de même capacité.
Pour créer votre sauvegarde, je vous conseille de choisir en haut à gauche le mode “Device Mode” et ensuite cliquer sur “Backup” en bas à droite. Donner un nom et un chemin pour la sauvegarde, valider.
Pour restaurervotre sauvegarde ou la copier sur une autre carte SD, micro SD ou clé USB de même capacité, il suffit de cliquer sur “Restore“, ensuite, choisir l’image à restaurer présente sur votre PC.
Ça fonctionne et c’est gratuit !
Voilà, j’en ai terminé avec cette deuxième partie.
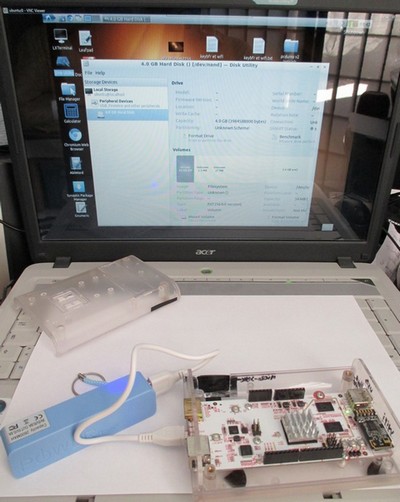
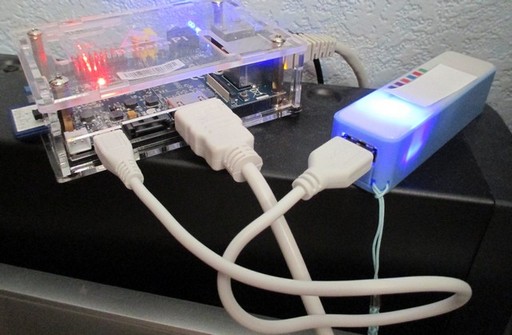
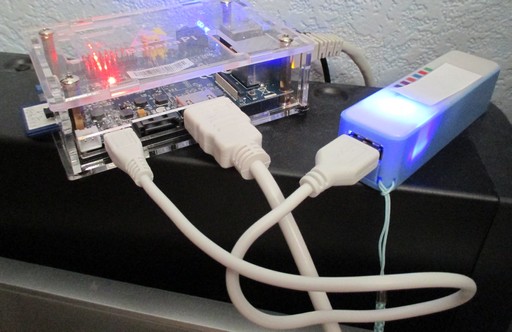
C’est une batterie de secours, qui offre une énergie de recharge pour smartphone. Cette alimentation de secours permet de fournir l’énergie dont l’appareil à besoin pour son rechargement, mais aussi une alimentation pour faire fonctionner des micro-ordinateurs qui utilisent normalement une alimentation en 5 v et 1 A au minimum.
Celle que je teste est de 2600 mHh. Elle m’a couté 5 € et pour cette somme, j’ai la batterie de secours et son câble USB/micro USB.
Attention ! Vous en trouverez aussi à 1800 mHh, seulement pour smartphone, mais pas assez puissant pour mon utilisation.
Je ne suis en aucun cas responsable des dommages occasionnés suite à une mauvaise manipulation.
Je l’utilise pour l’alimentation en énergie de mes micro-ordinateurs que sont, le pcDuino V2, le Banana Pi, et pour recharger mes téléphones et mes smartphones …
L’autonomie est de “+ de 3 heures“, pour le pcDuino V2 avec son Wi-Fi intégré qui utilise beaucoup d’énergie, mais un processeur A8 à 1 GHz qui consomme moins qu’un double cœur.
Pour le Banana Pi, avec un double cœur, c’est plus complexe ! Il faut le faire avec un Banana Pi en mode VNC serveur sans clavier ni souris et sans HDMI.
(Prochainement, le Banana Pi en test avec une batterie de secours solaire de 5000 mHh)
Information importante :
Vous ne pouvez pas utiliser cette batterie de secours sur une tablette qui se recharge avec une alimentation de 12 V ! (Ex : tablette 97RQ qui se recharge en 12V, aucun rechargement possible via le connecteur USB)
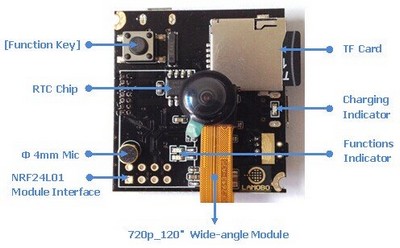
Encore du nouveau et prochainement disponible, c’est le BPi-D1.
C’est un genre de micro-ordinateur, comme le Banana Pi, mais en plus petit, autonome, avec des fonctions d’enregistrement vidéo en HD. Un processeur cadencé à 400 Mhz, 64 Mo de DDR2, 16 Mo de SPI Flash, des GPIO, un connecteurmicro SD, Wifi intégré, connecteur pour batterie externe …
Ce n’est pas tout !
C’est aussi la plus petite carte de développement (Open Source), autour d’une caméra HD, qui permet la capture en 1280 x 720 à 30 images par seconde.
C’est cool, non !
Se concocter un petit boitier et ensuite faire du développement dessus.
.
.
.
Caractéristiques :
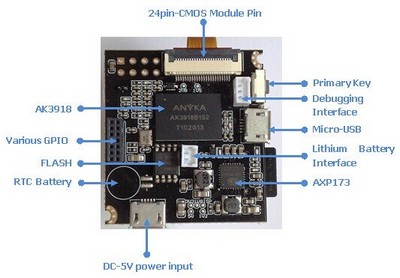
. Processeur 400 MHz RISC ARM926EJ en 32Bits
64 Mo DDR2
16 Mo SPI-FLASH
Connecteur micro SD, supporte 8G, 16G, 32G
CMOS Image avec capteur de 720P, la lumière visible avec 940 nm dans les deux sens, filtre de lentille infrarouge, avec fonction infrarouge en mode nuit
Lentille de la caméra M7 * P0.35 EFL = 3.0mm / F.NO = 2,8 / Angle = 60 °
Vidéo avec un encodage matériel en H.264 à 1280x720p_30fps.
32 Go sur la micro-SD peut stocker 120 heures de données vidéo
Format audio : MP3 / WMA / AAC
Module Wi-Fi RTL8188EUS intégré, en 802.11b/g/n
Circuit RTC et OSD
Puce de gestion d’alimentation Li-ion AXP173
Micro intégré
Consommation en enregistrement : 5V 200mA
Consommation en mode WiFi: 5V 350mA
Enregistrer en continu des données audio ou vidéo 720p pour 24 heures quand une puissance mobile 10000mAh est disponible.
Nous utilisons des cookies pour vous garantir la meilleure expérience sur notre site web. Si vous continuez à utiliser ce site, nous supposerons que vous en êtes satisfait.OKPolitique de confidentialité